Hyperion
Voraussetzungen :
1x Raspberry Pi Model B
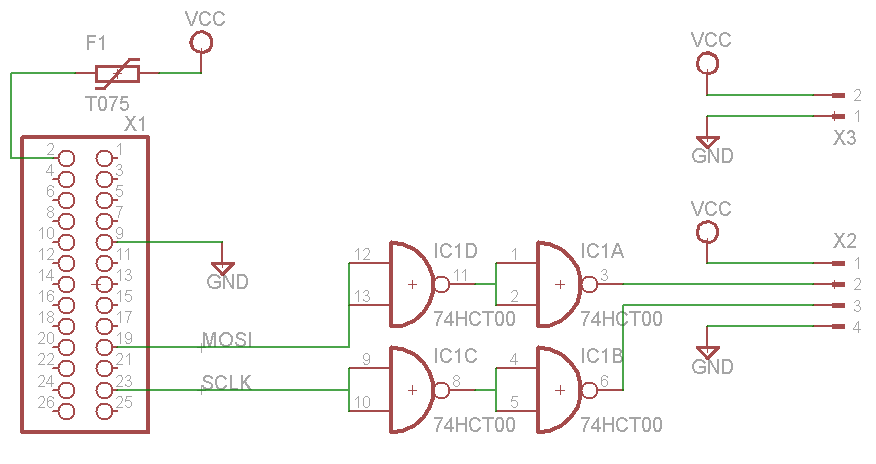
1x Spannungswandler für I2C Bus (selbstbau mit 74HCT00)
1x Netzteil
LED Leiste WS2801 mit entsprechender Länge
Pegelwandler :
Da der I2C Bus des Raspberry einen 3,3 Volt Pegel ausgibt, jedoch der Eingang des WS2801 einen 5V Pegel benötigt kommt der 74HCT00 zum Einsatz. Wichtig ist, das es sich um die HCT Variante handelt, da nur diese am Eingang 3,3V Pegel „versteht“ aber 5V Pegel ausgibt.
Da der 74HCT00 ein Invertiert, werden die beiden Eingänge gebrückt, und nochmals negiert.
Eine genaue Dokumentation ist hier zu finden : https://github.com/tvdzwan/hyperion/wiki/hardware
RASPI-CONFIG :
Um Hyperion verwenden zu können muss im Raspi SPI aktiviert sein.
SPI kann über „raspi-config“ aktiviert werden. Nach der Aktivierung erfolgt die abfrage, ob die Kernel Module beim Start in den Kernel eingebunden werden sollen. Dies sollte auch mit Ja bestätigt werden.
PAKETE :
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libqtcore4 libqtgui4 libqt4-network libusb-1.0-0 libprotobuf7 ca-certificates
Installation von Hyperion : https://github.com/tvdzwan/hyperion/wiki/Installation
wget -N https://raw.github.com/tvdzwan/hyperion/master/bin/install_hyperion.sh
sudo sh ./install_hyperion.sh
Test der Installation :
hyperion-remote --priority 50 --color red --duration 5000
USB Video Grabber
In die Datei /etc/hyperion.config.json folgende Einträge anfügen (vor end of JSON):
/// Configuration for the embedded V4L2 grabber
/// * device : V4L2 Device to use [default="/dev/video0"]
/// * input : V4L2 input to use [default=0]
/// * standard : Video standard (no-change/PAL/NTSC) [default="no-change"]
/// * width : V4L2 width to set [default=-1]
/// * height : V4L2 height to set [default=-1]
/// * frameDecimation : Frame decimation factor [default=2]
/// * sizeDecimation : Size decimation factor [default=8]
/// * priority : Hyperion priority channel [default=800]
/// * mode : 3D mode to use 2D/3DSBS/3DTAB (note: no autodetection) [default="2$
/// * cropLeft : Cropping from the left [default=0]
/// * cropRight : Cropping from the right [default=0]
/// * cropTop : Cropping from the top [default=0]
/// * cropBottom : Cropping from the bottom [default=0]
/// * redSignalThreshold : Signal threshold for the red channel between 0.0 and$
/// * greenSignalThreshold : Signal threshold for the green channel between 0.0$
/// * blueSignalThreshold : Signal threshold for the blue channel between 0.0 a$
"grabber-v4l2" :
{
"device" : "/dev/video0",
"input" : 0,
"standard" : "PAL",
"width" : -1,
"height" : -1,
"frameDecimation" : 2,
"sizeDecimation" : 8,
"priority" : 900,
"mode" : "2D",
"cropLeft" : 5,
"cropRight" : 5,
"cropTop" : 5,
"cropBottom" : 5,
"redSignalThreshold" : 0.0,
"greenSignalThreshold" : 0.0,
"blueSignalThreshold" : 0.0
},
Farben Kalibrieren :
http://www.joachim-wilke.de/blog/2015/01/22/hyperion-ambilight-kalibrieren/
Nützliches Forum :
http://www.forum-raspberrypi.de/Forum-ambilight?page=10